|
|
2010年度卒業研究〜GPS付き車いす経路リアルタイム案内システム〜
情報バリアフリー研究室 大野 敬太
|

概要
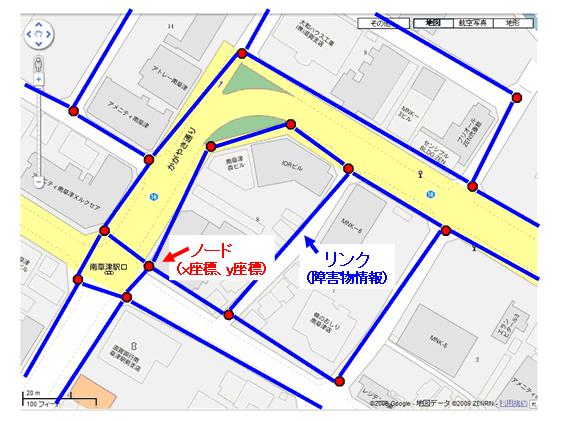
車いすでの移動は、経路によって進むのが困難な道や、引き返すことを強いられる道に出くわすことがあり車いす利用者は安心して外出することができない。本研究では、車いす利用者の自律移動支援を行うために、道路の障害物を考慮することで、車いす利用者にとって移動の妨げとなる障害物を回避し、ユーザがGPSレコーダで現在地を取得し,目的地を入力することで現在地から目的地までの最適な経路を導き出すシステムである.このシステムは利用者が移動可能な障害物を入力し、その入力条件を考慮して現在地から目的地までの最適経路を案内する。また、地図上に障害物情報として、障害物の写真、説明を利用者に提供する。
本研究で大野は、最適経路を導き出す際に必要なデータの収集をした。必要なデータとは、縦勾配、横勾配、段差である。データを調査する際、車いす視点で調査地域を回ると様々な危険箇所を発見した。本研究で障害物と定める縦勾配、横勾配、段差のうち3度以上の縦勾配は5箇所、3度以上の横勾配は5箇所あった。段差に関しては自力で進むことが困難である箇所は2あった。本研究の障害物以外にも視界の悪い曲がり道や、横断歩道の待機場所の少しの傾斜等、本研究では考慮できていない箇所がある。
車いす利用者が安心して外出するためには、数多くの障害物を考慮した経路案内システムが必要である。
|
入力画面
入力画面では近隣の建物・目的地を選択し、利用者が移動可能な障害物情報(縦断勾配・横断勾配・段差)を選んでもらう。図1に示したのは、近隣の建物・目的地選択でプルダウン形式でカテゴリ別に表示した。図2に示したのは障害物選択画面で、ラジオボタン形式で選択してもらう。
l
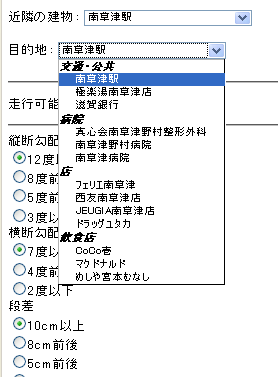
図1,入力画面
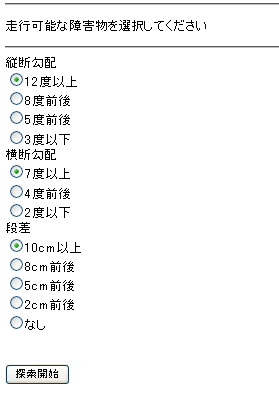 図2,入力画面
|
調査範囲
今回南草津の調査対象となる地域の総ノード数は80、総リンク数は144、調査対象地域の勾配を調査した結果、JR南草津駅から立命館大学までの間はなだらかな傾斜となっており、南草津駅から南東に伸びる道路には1度・2度の縦断勾配が数多くみられた。以下の図3は縦断勾配2度の歩道であるが、このような傾斜が南草津駅から南東に数多く見られる。縦断勾配3度からは徐々に負担を感じはじめ、7度前後では大きな負担となり、10度前後での移動は危険が伴ってくる。また横の傾斜が存在する箇所は縦の傾斜に比べて少なく、縦の傾斜が急な箇所に急な横断勾配が数多く見られた。
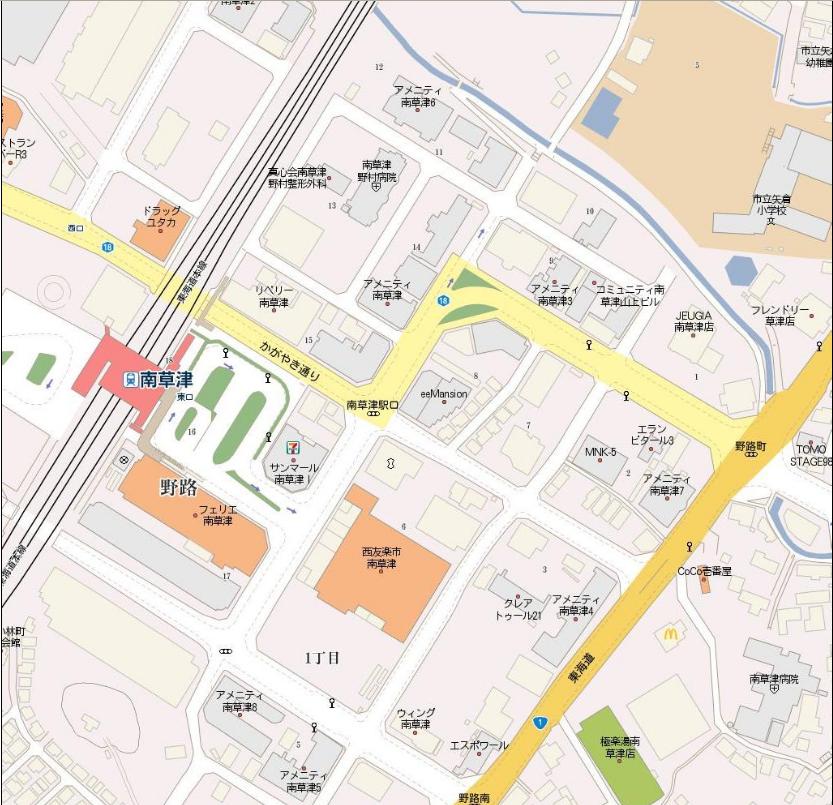
図3,調査範囲
|
障害物
・縦断勾配たは、移動方向に対して前後に高低さがある傾斜
| 縦断勾配 |
障害物の説明 |
画像 |
| 3度以下 |
無理なく自走できる。 |
図7 |
| 5度前後 |
若干の負担が掛かるが自走可能である |
|
| 8度前後 |
下りの場合加速する。 |
図8 |
| 12度以上 |
上がりの場合後ろに倒れそうになる。 |
図9 |
・横断勾配たは、移動方向に対して左右に高低さがある傾斜
| 横断勾配 |
障害物の説明 |
画像 |
| 2度以下 |
自走可能。 |
|
| 4度前後 |
左右に流されるようになる。 |
図10 |
| 7度以上 |
体が傾き走行が困難になる。 |
図11 |

図10,4度前後

図11,7度前後
|
|
歩道付き道路 |
路地 |
| 利点 |
車道と歩道が分かれており安全。 |
段差も急な傾斜もなく車いすが移動しやすい。 |
| 欠点 |
車が歩道を横断する箇所に急な傾斜、段差がみられる。 |
すぐ近くを車が通るため危険。 |
 |
実行結果
<ケース1>
近隣の建物:南草津病院(赤エリア)
目的地:ドラッグユタカ
縦断勾配:12度以上
横断勾配:7度以上
段差:10cm以上
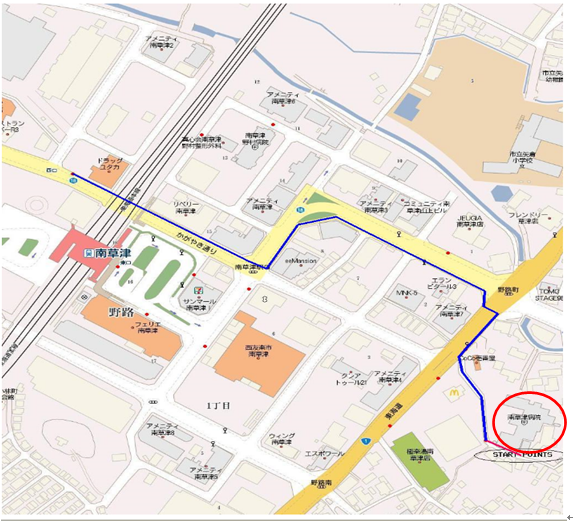 図12,経路表示
赤い印が表示される.<ケース1>では勾配,段差を考慮しないので,介助者がいる場合には,この経路が選択されると思われる.
<ケース2>
近隣の建物:南草津病院(赤エリア)
目的地:ドラッグユタカ
縦断勾配:3度以下
横断勾配:2度以下
段差:なし
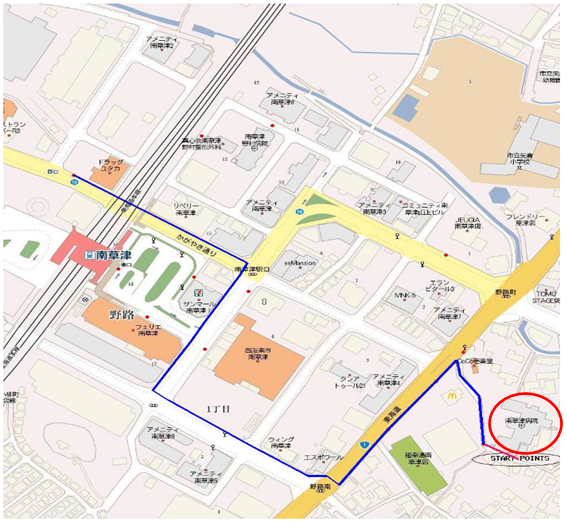 図13,経路表示
|
結論
本研究では、車いす利用者の自律移動支援を行うために、移動の妨げとなる障害物を回避し、最適であると思われる安全な経路を案内するシステムをどう研究室の木下泰治氏と共同で作成した。その中で中津は最適経路を導き出す際に必要なデータの収集および入力を担当した。最適経路を導き出す際に必要なデータとは、距離、縦断勾配、横断勾配、段差であり、それらのデータを収集した。
既存のシステムでは、利用者が移動可能な障害物を利用者自身が選択できず、実際移動が可能であるか不確かであった。また、障害物がある箇所を地図上に色付けしているだけで、実際の写真、説明がないといった問題点があった。
本研究ではそれらの問題点を改善し、利用者が移動可能な障害物情報を入力することで、最適経路を導き出すシステムとした。また、障害物が存在する箇所にマークを加え、クリックすると障害物の写真、説明を表示させる。そしてGPSを用いることにより,本研究の地図上であればどの場所からでも目的地へ行くことが可能になった.また本研究では障害物を勾配の傾斜角のみを条件としていたが、今後は勾配の持続距離による負担の増減や車いすの種類、その他数多くの車いすでの危険を加味した経路案内システムが必要だと考える。
|
|
|