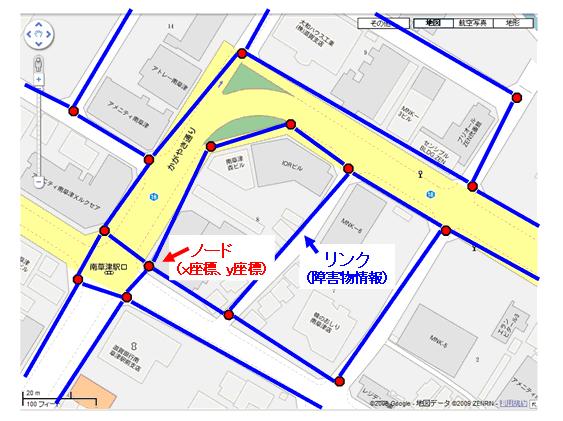
本研究では、車いす利用者の自律移動支援を行うために、移動の妨げとなる障害物を回避し、最適であると思われる安全な経路を案内するシステムをどう研究室の木下泰治氏と共同で作成した。その中で中津は最適経路を導き出す際に必要なデータの収集および入力を担当した。最適経路を導き出す際に必要なデータとは、距離、縦断勾配、横断勾配、段差であり、それらのデータを収集した。
既存のシステムでは、利用者が移動可能な障害物を利用者自身が選択できず、実際移動が可能であるか不確かであった。また、障害物がある箇所を地図上に色付けしているだけで、実際の写真、説明がないといった問題点があった。
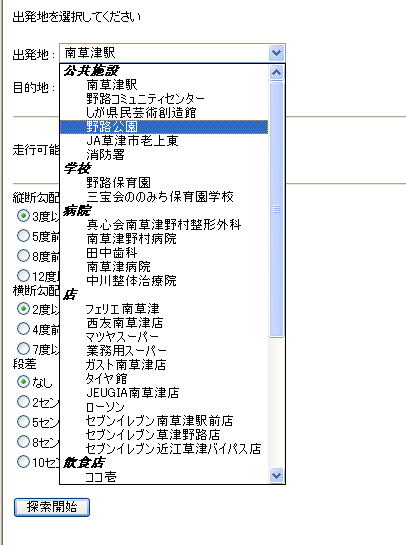
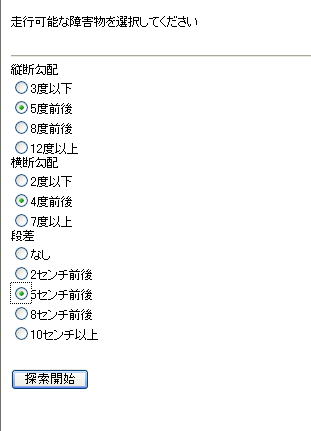
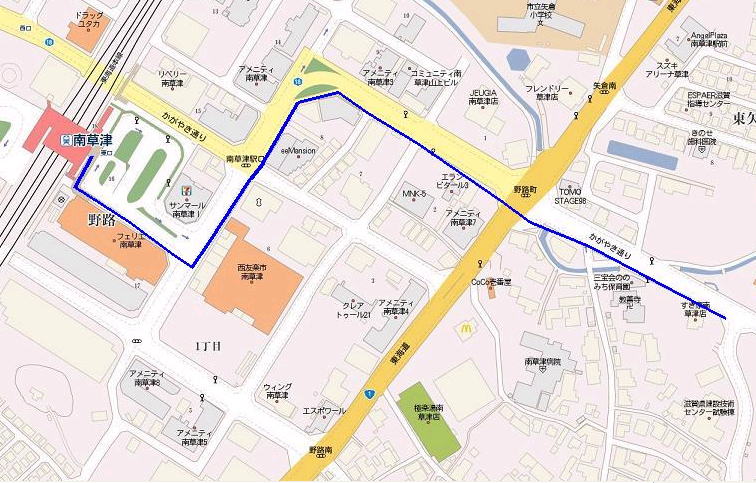
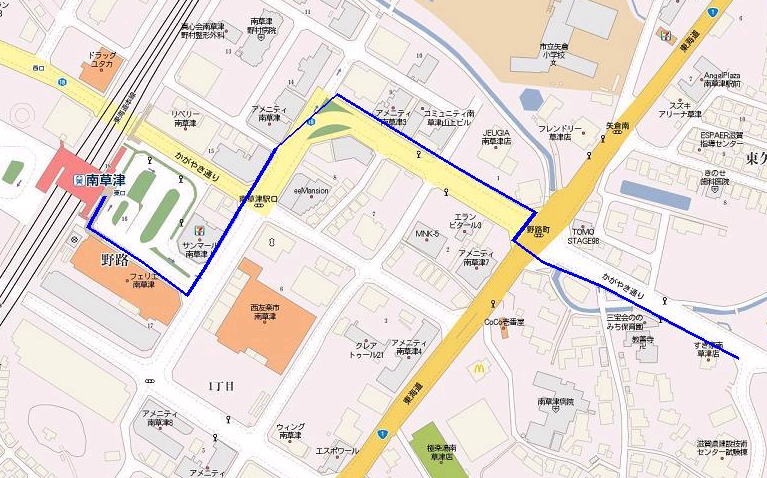
本研究ではそれらの問題点を改善し、利用者が移動可能な障害物情報を入力することで、最適経路を導き出すシステムとした。また、障害物が存在する箇所にマークを加え、クリックすると障害物の写真、説明を表示させる。しかし出発地、目的地が選択形式となっており、利用者自身が行きたい箇所を地図上でクリックすることで出発地、目的地として選択できるシステムの作成という課題もある。また本研究では障害物を勾配の傾斜角のみを条件としていたが、今後は勾配の持続距離による負担の増減や車いすの種類、その他数多くの車いすでの危険を加味した経路案内システムが必要だと考える。